Toute l’installation physique a subi des refontes majeures. J’ai appris de mes essais passés pour former une version ultime, une version PROPRE (du moins correcte !).
Je vais retracer les étapes de la conception et de la réalisation de cette version du système pour vous expliquer ma démarche.
J’ai aussi rédigé une petite documentation à ce sujet.
Le câblage autour de la chambre
Planification des boîtiers de dérivation
J’ai commencé le processus par une longue étape d’ingénierie. J’ai dans un premier temps défini les objectifs : avoir tel périphérique à tel ou tel endroit… Les composants se répartissent tout autour de la chambre. Ils sont présentés dans un article précédent. J’ai également défini des contraintes :
- Chaque partie du système doit être modulaire : démontable facilement pour maintenance et future évolution.
- Les câbles parcourant la chambre doivent être en petit nombre (et donc optimisés), pour éviter d’avoir trop de câbles partant de la plaque centrale.
- La plaque centrale doit être propre : cela passe par des connectiques pour les câbles partant en périphérie de la chambre.
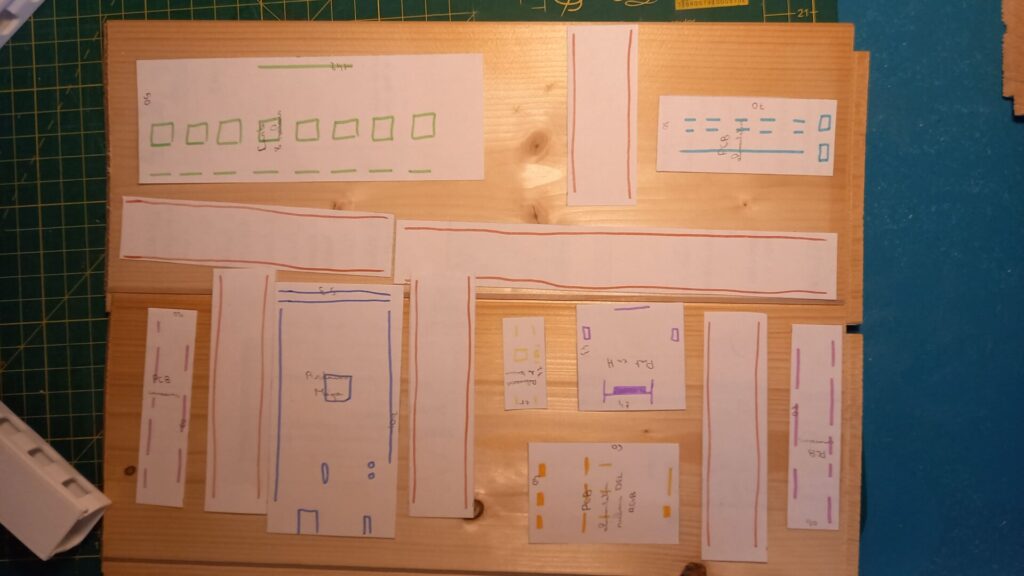
Une fois les définitions faites, j’ai pu déterminer le nombre de fils électrique nécessaire pour chaque appareil (deux pour un périphérique basique, quatre pour un ruban lumineux…). Cela m’a permis de dimensionner correctement les besoins en câbles. J’ai ensuite dressé des premiers schémas sur papier :
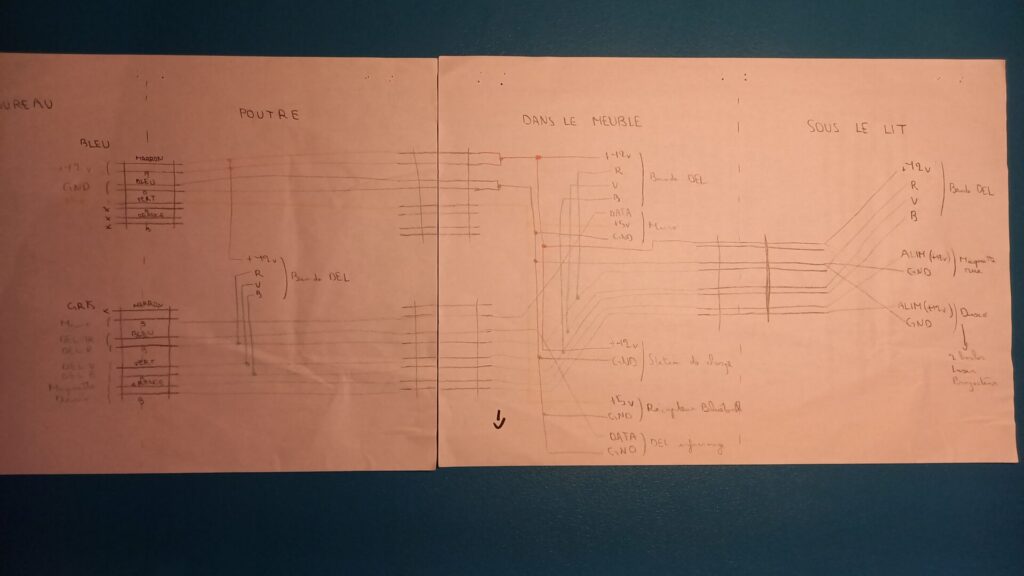
Ces premiers dessins m’ont permis d’avoir un aperçu de la structure du système. J’ai notamment défini plusieurs « arrêts » pour les câbles, ou ils seront connectés à des boîtiers pour desservir des appareils :
- Au niveau de la poutre (alimentation de rubans lumineux).
- Dans le meuble blanc (alimentation de rubans lumineux, alimentation du récepteur Bluetooth, connexion de la DEL infrarouge de contrôle du système d’enceintes, alimentation de la station de charge et connexion au microphone).
- Sous le lit, dans l’angle de la chambre (alimentation des jeux de lumière, de la maquette de rue et de rubans lumineux).
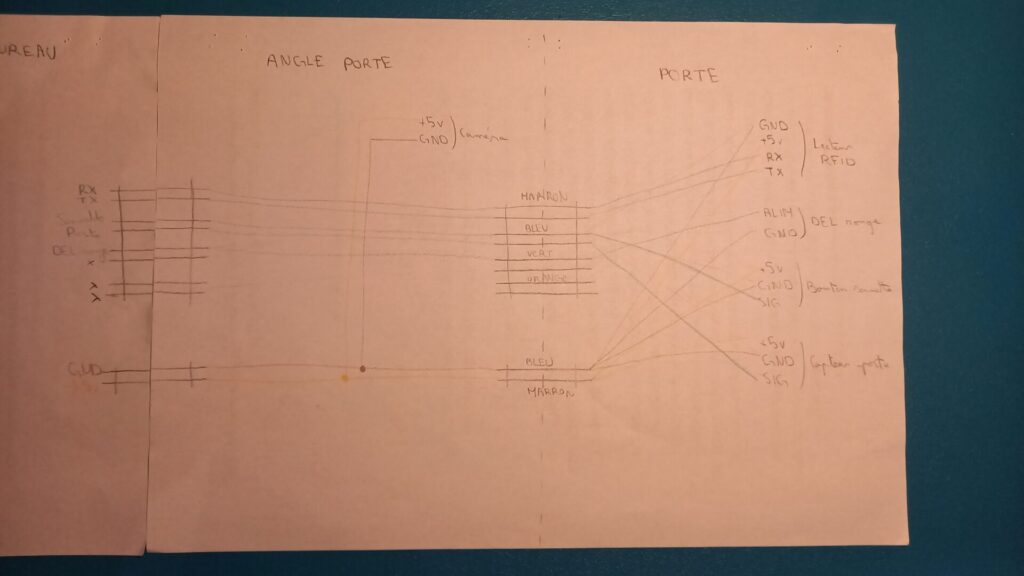
- Dans l’angle de la porte (il n’y a pas de boîtier, juste une dérivation de l’alimentation 5v dans la goulotte pour alimenter la caméra).
- Dans la porte (capteur de position de la porte, lecteur de carte RFID, bouton de sonnette et DEL rouge).
Voici un petit plan pour mieux s’y retrouver :
Réalisation dés boîtiers de dérivation
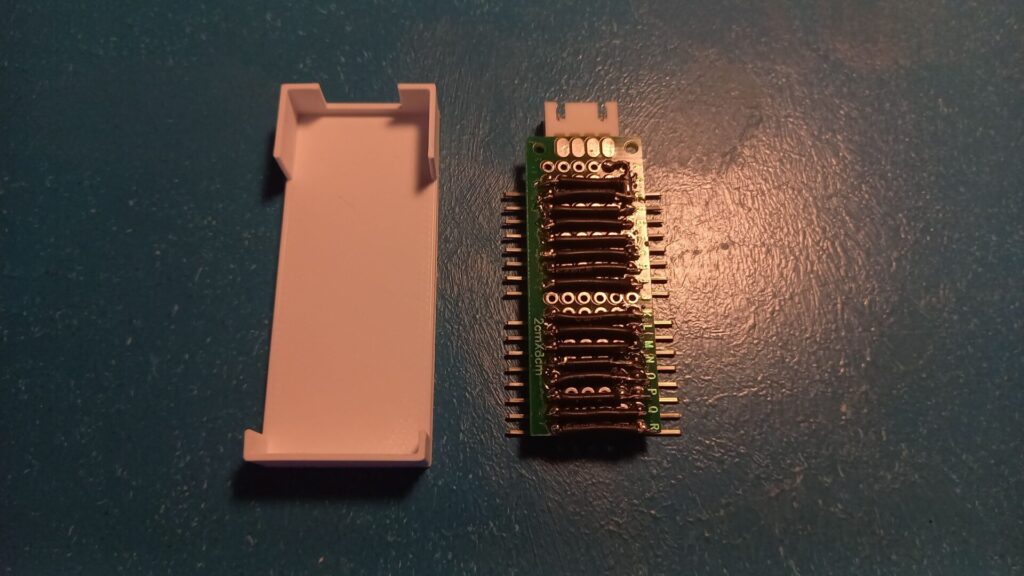
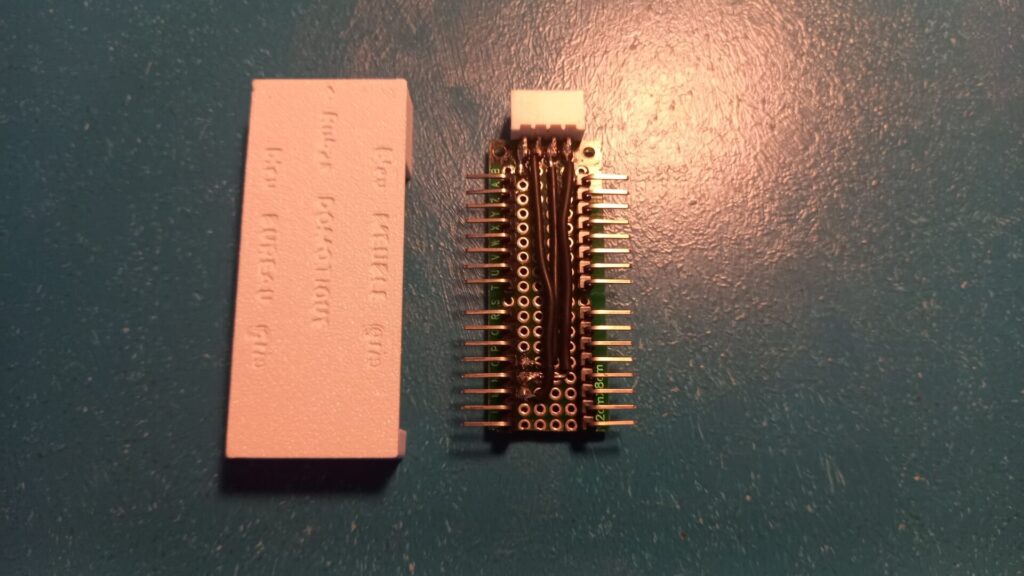
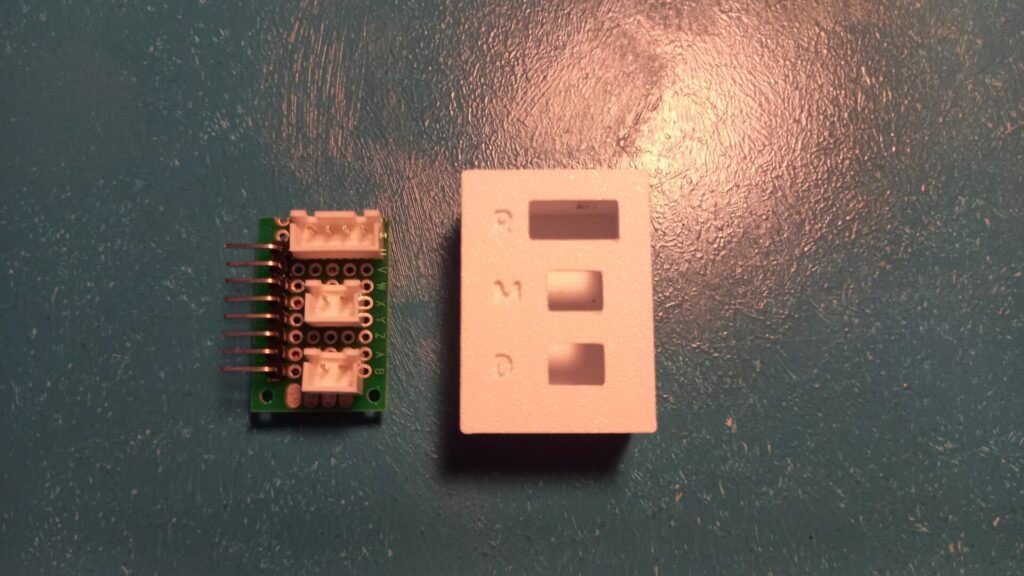
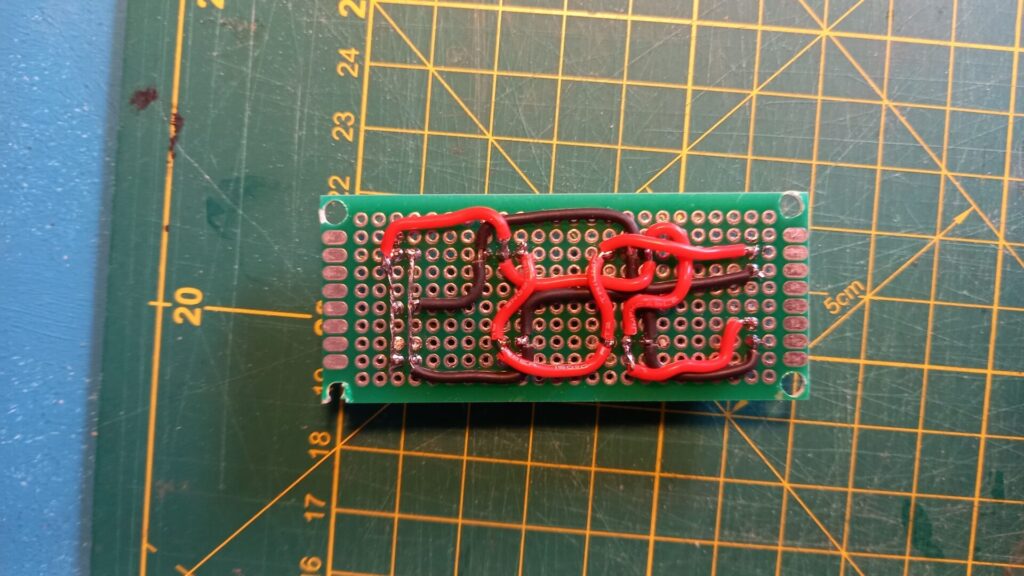
J’ai commencé par réunir chaque composant nécessaire à la réalisation des circuits : ce sont principalement des connecteurs. Cela me permet de dimensionner les circuits imprimés de prototypage. J’organise ensuite les composants dessus pour avoir un premier aperçu du résultat. Avant de souder le tout, je reprends une feuille et un crayon de papier pour tracer les fils électriques qui lient chaque composant. Globalement, les circuits sont très simples : il s’agit de relier les connecteurs entre eux, en récupérant les signaux qui nous intéressent. J’applique ensuite mes schémas en soudant le tout.
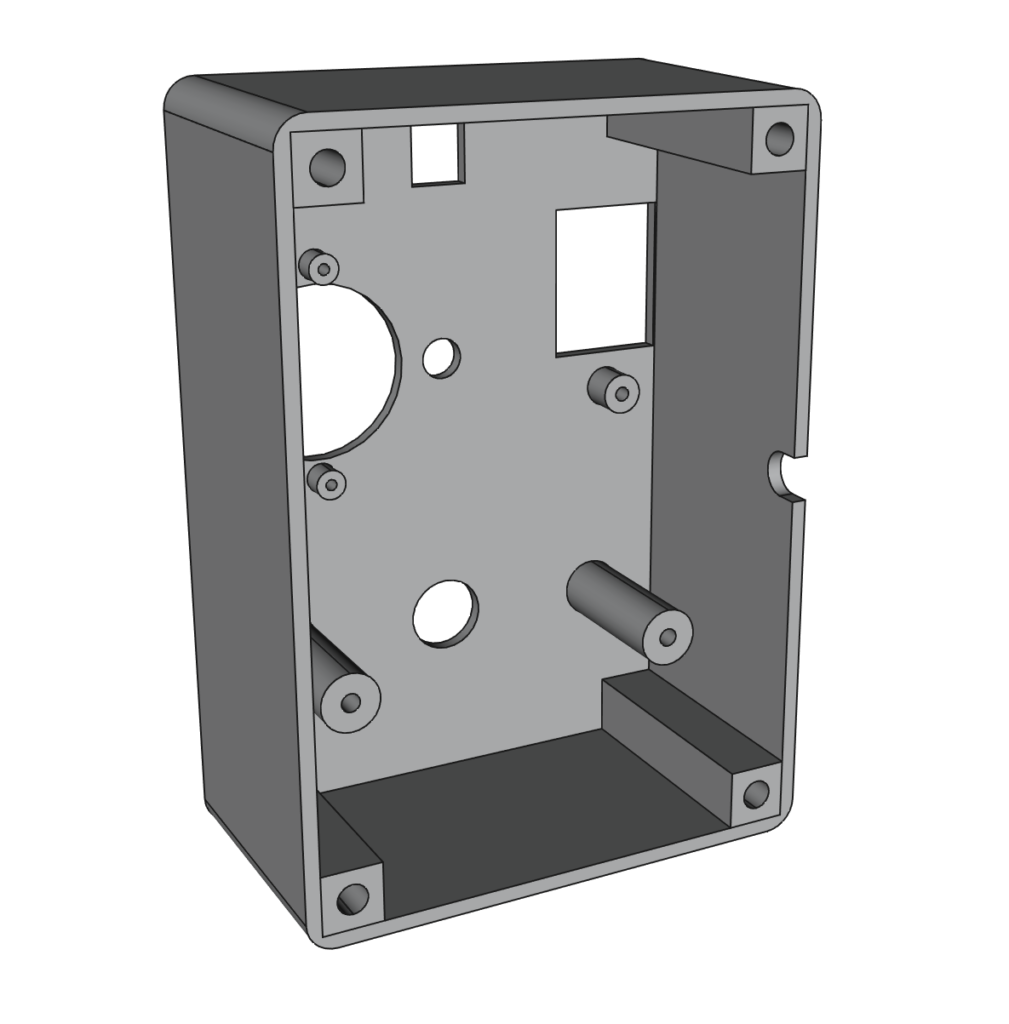
À ce stade, les circuits sont parfaitement fonctionnels, mais ce n’est pas terminé : il manque encore un enrobage pour obtenir un produit propre. J’ai donc modélisé sur FreeCAD un boîtier pour chaque circuit à l’aide de mon pied à coulisse. Quelques impressions plus tard, et voilà le résultat :
Liaison entre les boîtiers de dérivation
Pour lier tous les boîtiers entre eux, je me suis majoritairement basé sur des câbles à paires torsadées (ceux utilisés pour l’Ethernet). Ce choix est dû à plusieurs raisons : un câble est composé de huit fils, ce qui simplifie grandement les câblages (moins de câbles à tirer), et j’avais à ma disposition une grande longueur de câble.
Ce type de câble n’est initialement pas conçu pour transporter de la puissance, mais pour mes périphériques à faible puissance, leur section suffit. J’ai eu un seul doute quant à la sécurité de cette solution : l’alimentation de la station de charge. Sa consommation peut être relativement importante.
Je me suis donc intéressé à la manière dont les câbles étaient dimensionnés. Le problème est l’effet Joule (dans certains cas, c’est une propriété utile, comme dans les radiateurs !) : un câble présente une très faible résistance, mais non négligeable dans certains cas. Comme dans les résistances que nous utilisons en électronique, les câbles dissipent une partie de l’électricité qui les traversent en chaleur. Cette quantité de chaleur produite dépend de l’intensité qui passe.
J’ai déterminé par quelques calculs que la configuration initiale (alimentation de la station en 5v) ne serait pas suffisante. Ce problème peut être résolu en diminuant l’effet Joule : il faut diminuer l’intensité. Comme P=U*I, augmenter la tension est la solution. En alimentant la station en 12 V et grâce à deux paires de câbles, j’ai déterminé que la configuration suffirait. C’est d’ailleurs la même solution que le PoE utilise : la tension est relativement élevée.
Je me suis lancé dans le tirage des câbles autour de la chambre. Le lien depuis le bureau jusqu’au meuble blanc se fait par deux câbles (donc 16 fils) étant donné le nombre important d’éléments connectés de ce côté.
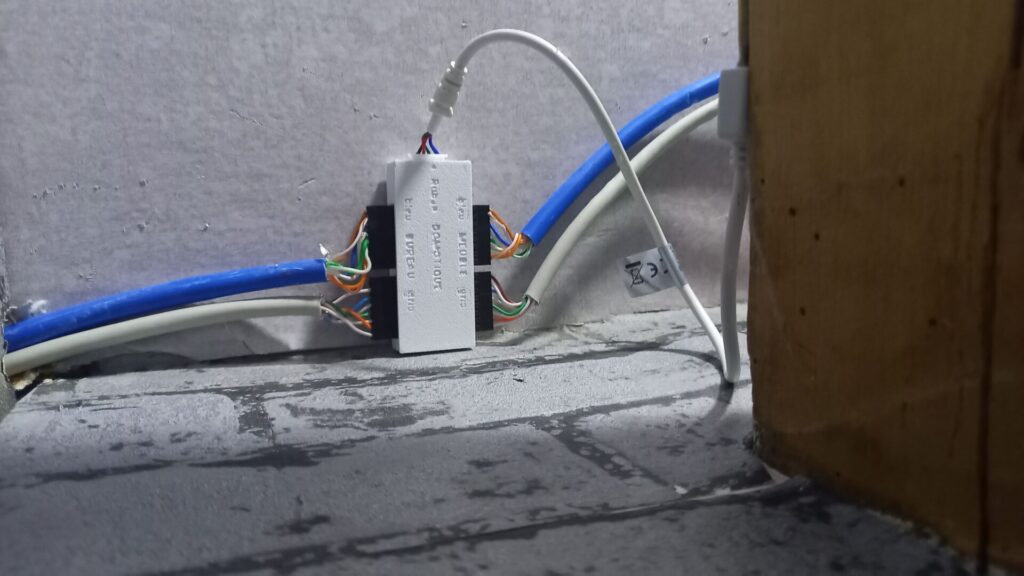
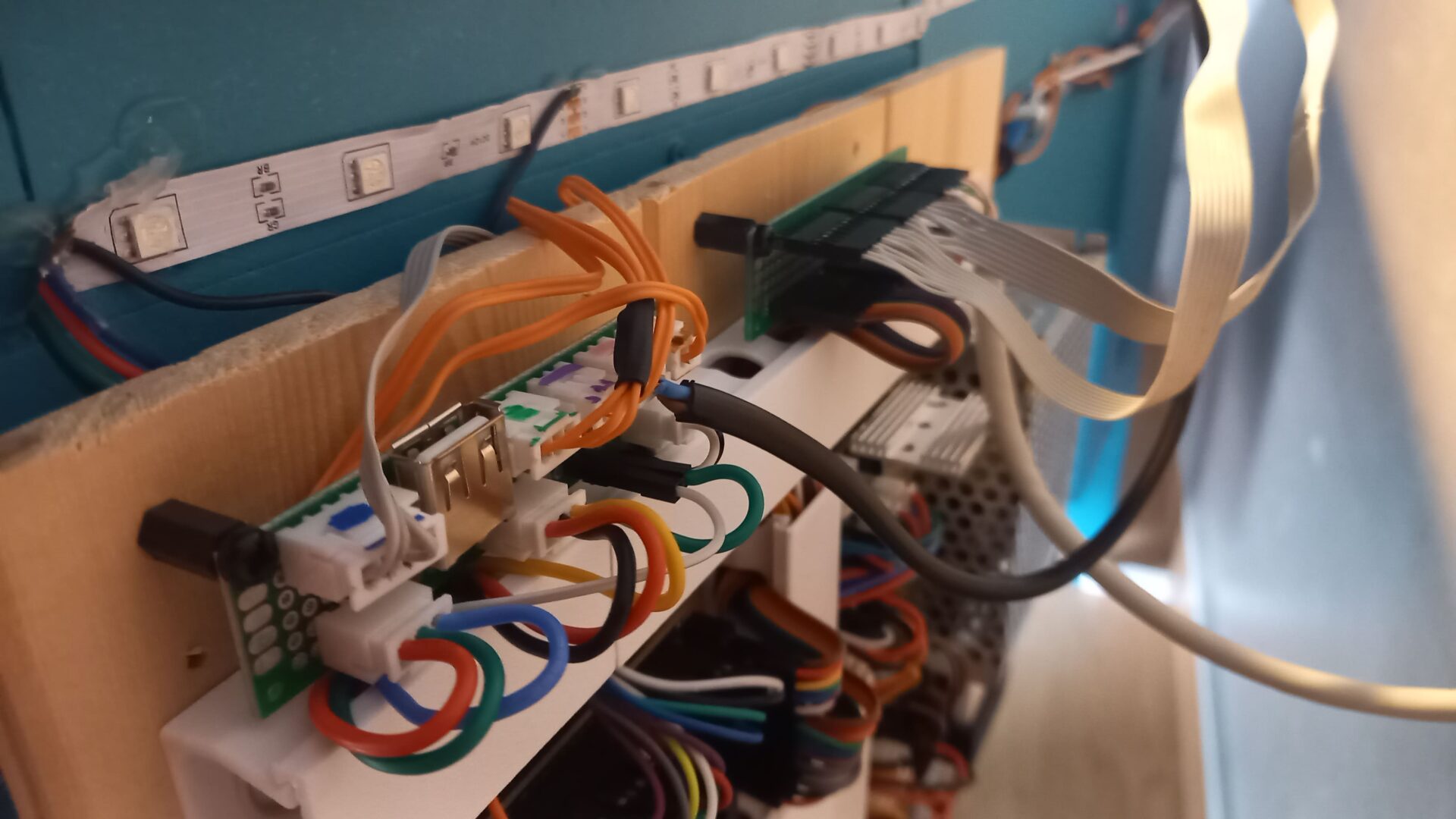
Le boîtier sous le bureau est certainement le plus dense en termes de connectique : il lie la plaque centrale à tout le reste de la chambre !

J’ai masqué le tout dans des goulottes pour continuer dans cette lignée de la propreté.

Vous avez peut-être remarqué que j’ai utilisé deux types de connecteurs : des Dupont et des JST. Il n’y a pas eu de mûres réflexions autour du choix des connecteurs. J’ai simplement utilisé ce que j’avais ! C’était une de mes premières expériences avec le sertissage. J’ai mis un certain temps à avoir la bonne technique, mais le résultat en vaut la peine ! Les connectiques sont solides et propres.

Conception et réalisation des éléments périphériques
Jusqu’ici, je n’ai fait que du câblage ! Il manque encore de nombreux éléments. Une partie d’entre eux est déjà en place :
- Les rubans lumineux (c’est assez facile à installer, il faut juste arriver à les garder collés dans le temps…).
- La maquette de rue (réalisée dans un projet antérieur).
- Le support de jeux de lumière (je l’ai réalisé sur la même période, mais il sera présenté dans un autre article ; ici, je considère qu’il est tout fait).
- Le cube de DEL (voir l’article dédié) ainsi que le gyrophare.
- Le lance-missile (voir le projet dédié).
Pour d’autres éléments, j’ai dû concevoir puis réaliser toute leur intégration. C’est ce que nous allons voir.
La station de charge
La station de charge est alimentée en 12 V. Son électronique interne est simple :
- Un convertisseur vers 5 V alimente une des connectiques USB-A ainsi que le chargeur de montre.
- Un module de charge rapide alimente le second connecteur USB-A.
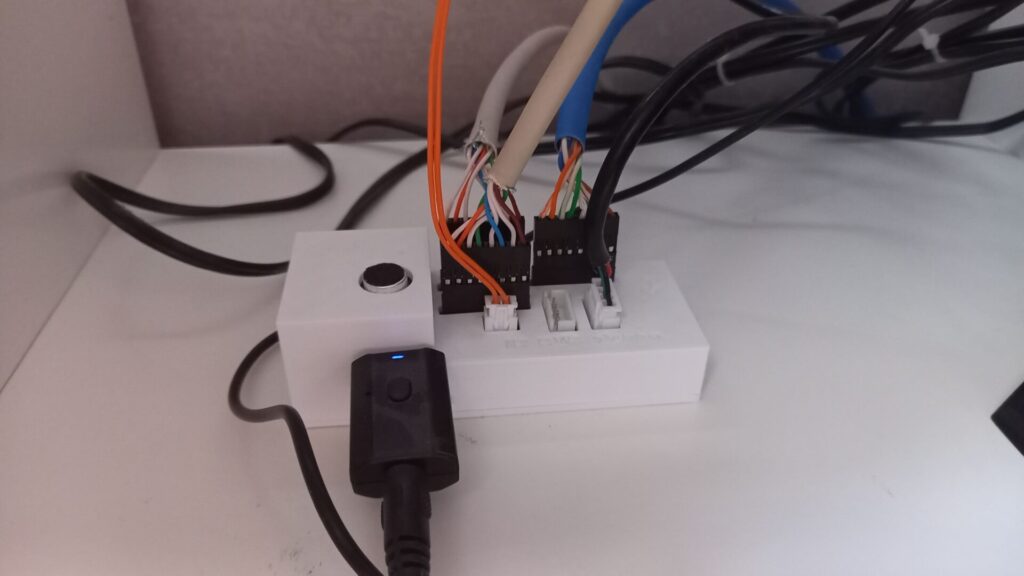
Le tout est enrobé dans un joli boîtier noir imprimé en 3D :

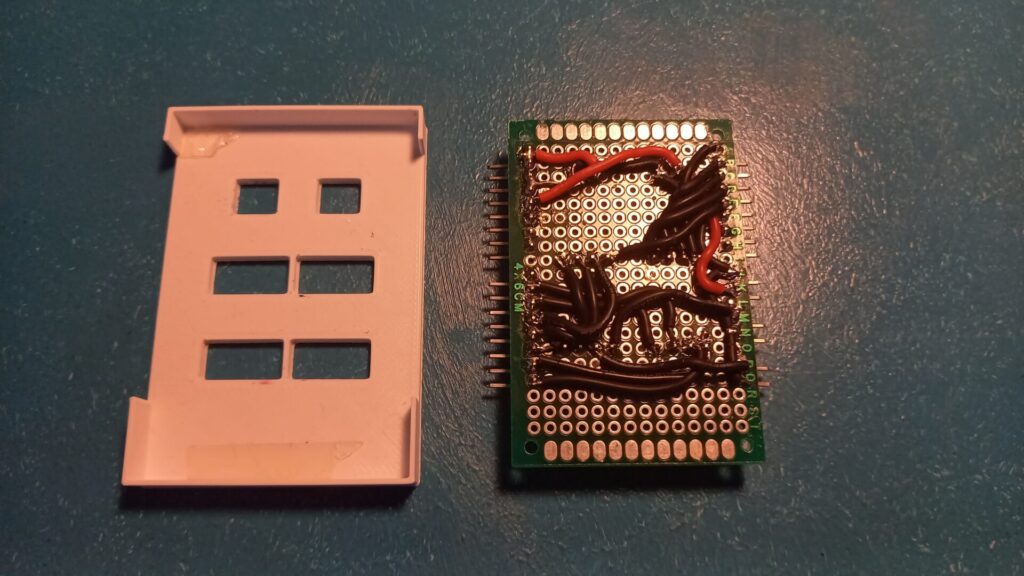
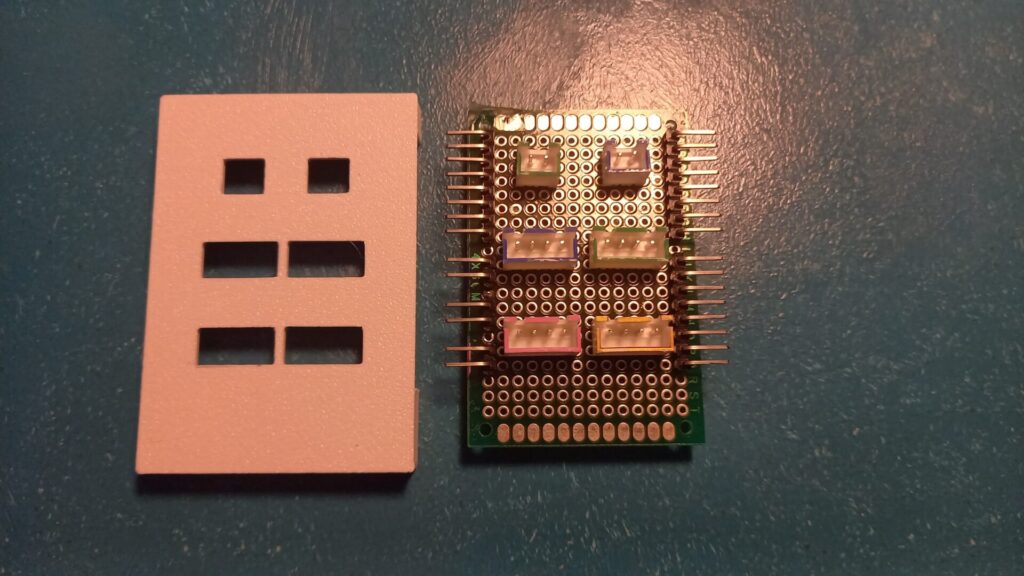
Le boîtier des capteurs
Le boîtier des capteurs est lié à la plaque centrale par un câble a quatre paires torsadées. Le nom que j’ai donné à cette composante du système n’est pas totalement juste : il y a le buzzer de l’alarme (mais chut !). Les autres composants sont de vrais capteurs.
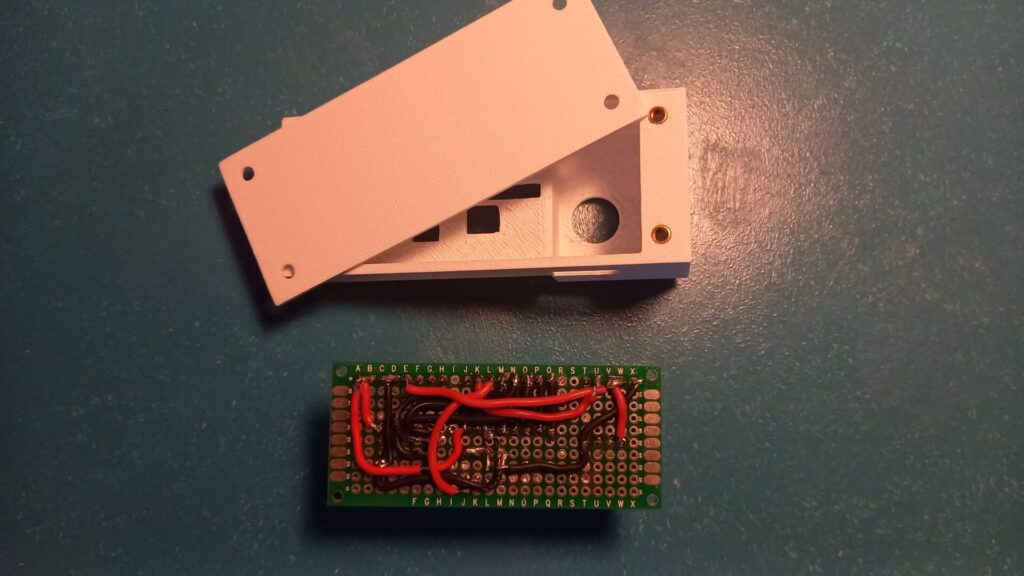
Comme pour les boîtiers précédents, j’ai planifié les circuits électriques sur papier :
L’électronique n’est pas particulièrement intéressante donc je n’ai pas pris de photo de l’intérieur. Encore une fois, l’impression 3D finit le tout :

Le boîtier de la porte
Plusieurs équipements sont installés sur la porte. À l’intérieur, se trouve un capteur de fin de course détectant l’ouverture et la fermeture de la porte de la chambre. À l’extérieur, se trouve un boîtier lisant des cartes RFID. Il y a aussi un voyant rouge et un bouton de sonnette.

Il arrive depuis la plaque centrale du système deux câbles : un à quatre paires torsadées (et plat, vous comprendrez après pourquoi) ainsi qu’un à deux fils (pour l’alimentation).
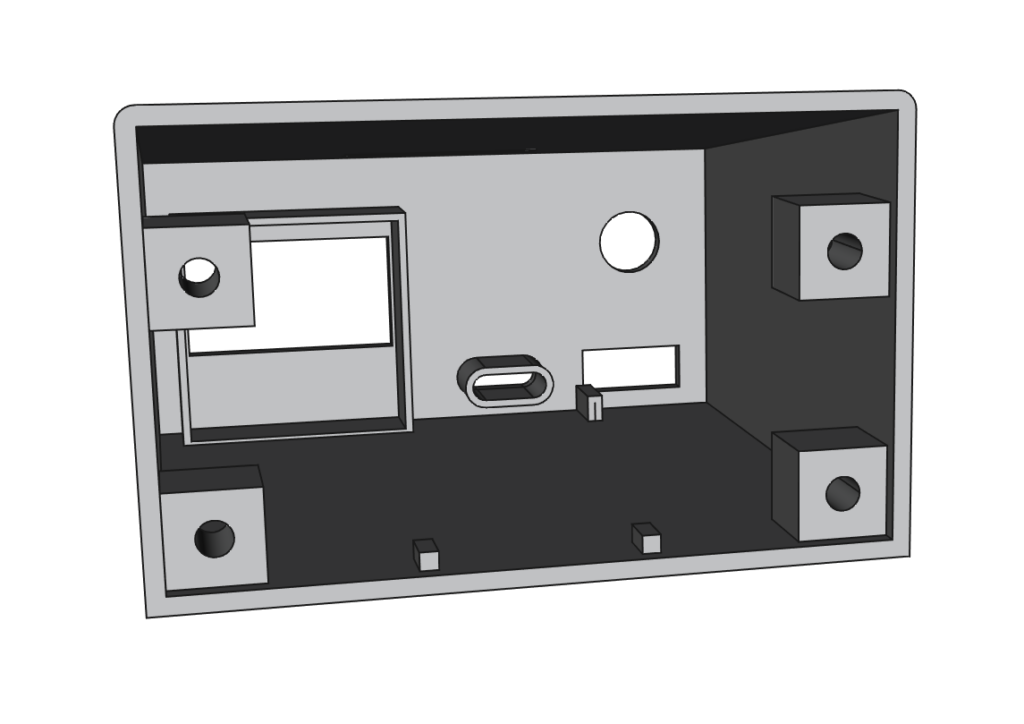
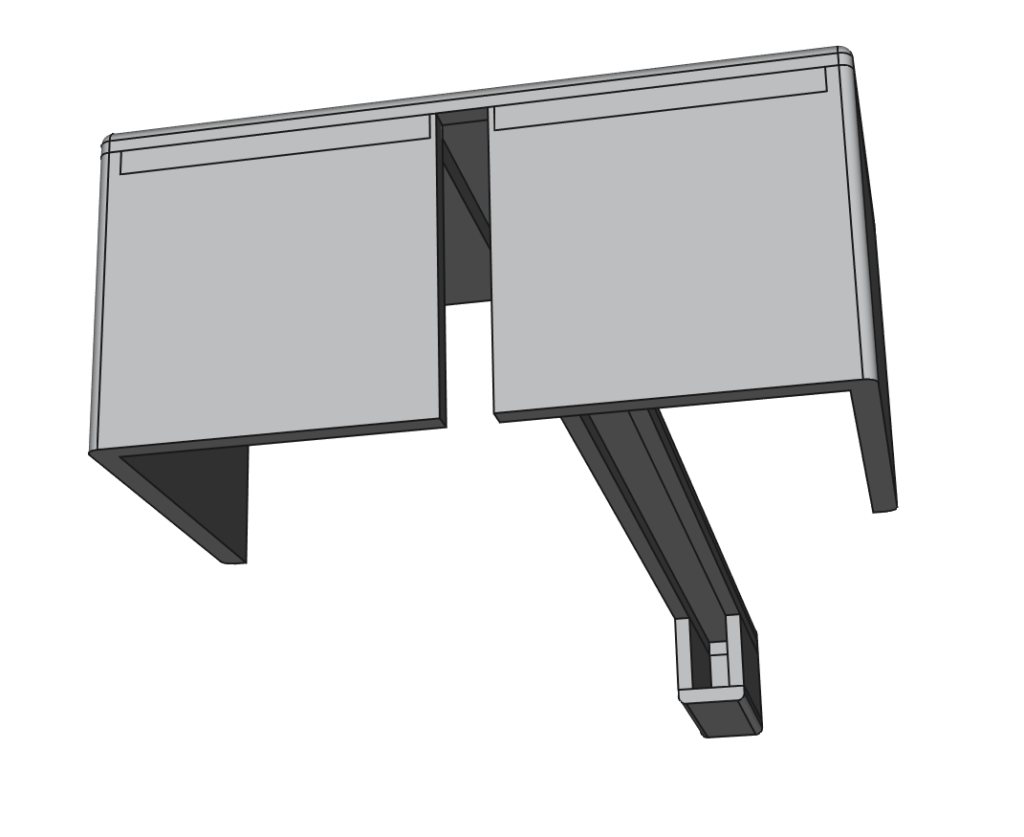
Les impressions 3D ne sont pas collées à la porte : elles sont prises en sandwich entre la platine de la poignée et la porte.

Il y a un petit passage pour les câbles :

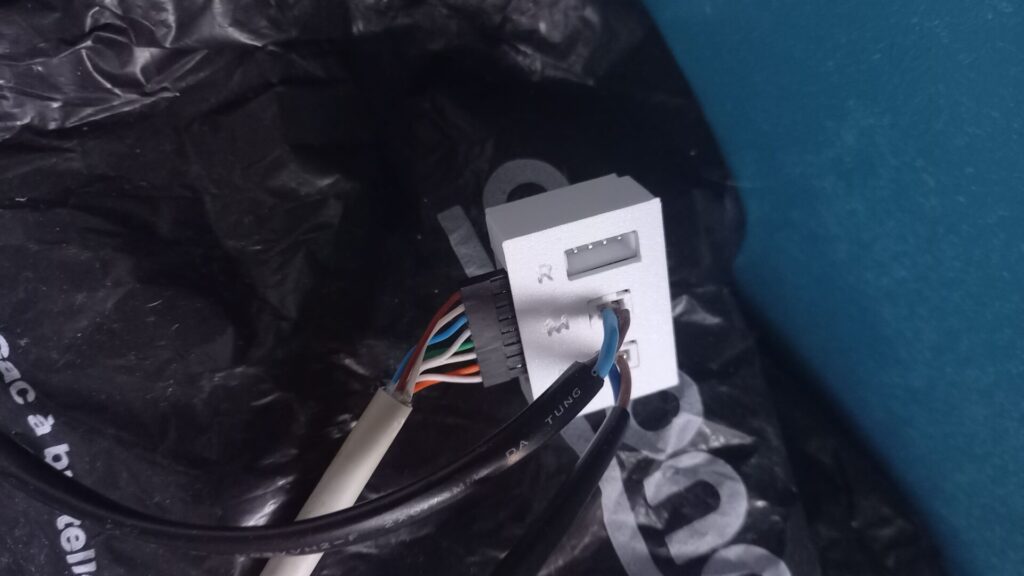
Un premier connecteur est situé dans la platine intérieure pour alimenter le capteur de fin de course.
Il y a une seconde section de fil qui passe de l’intérieur à l’extérieur de la chambre grâce à un trou de serrure qui n’est pas apparent. Le connecteur extérieur est adapté pour passer par la serrure (il est séparé en deux).
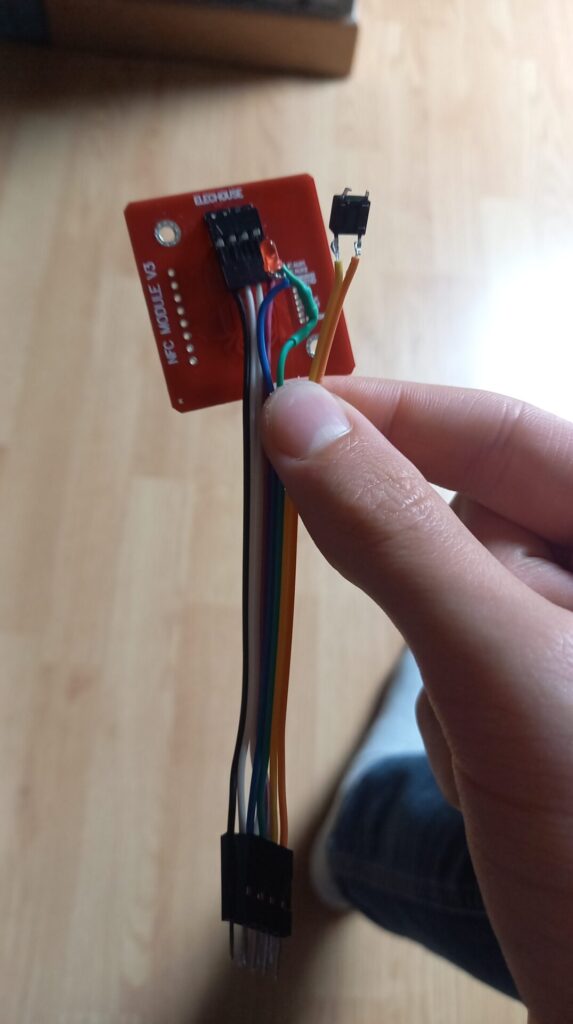
J’ai changé de lecteur de carte pour cette version, en passant du traditionnel lecteur RFID RC522 pour un module PN532 NFC V3. Ce changement est motivé par deux avantages de ce dernier : il est plus compact que l’autre, et il offre une communication en UART haute vitesse, ce qui permet d’utiliser le module à une longue distance de l’Arduino Mega (contrairement au SPI qui est plus sensible aux interférences).

J’utilise souvent de la patte à tout fixer pour cacher les voyants lumineux dérangeants sur les circuits imprimés.
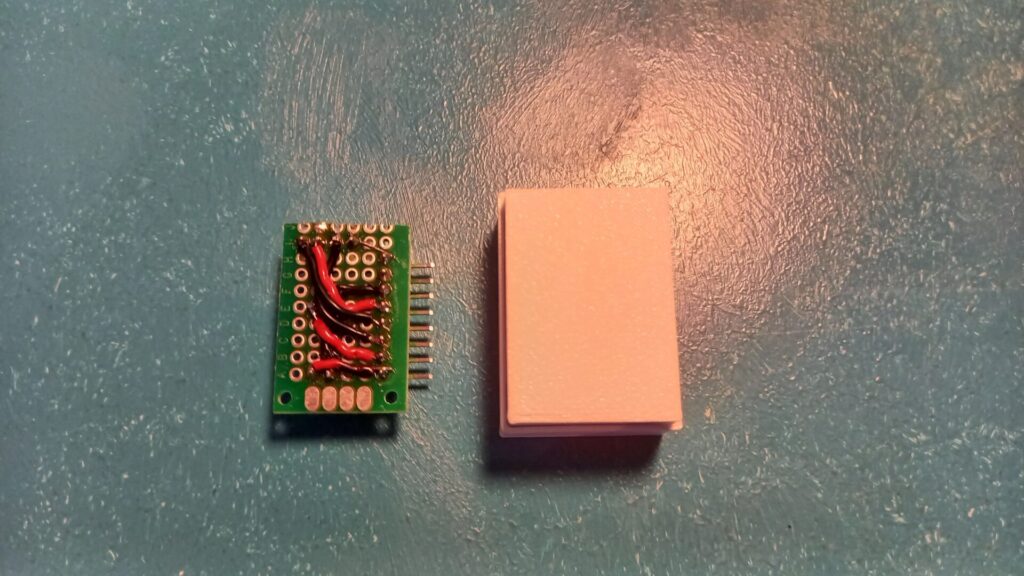
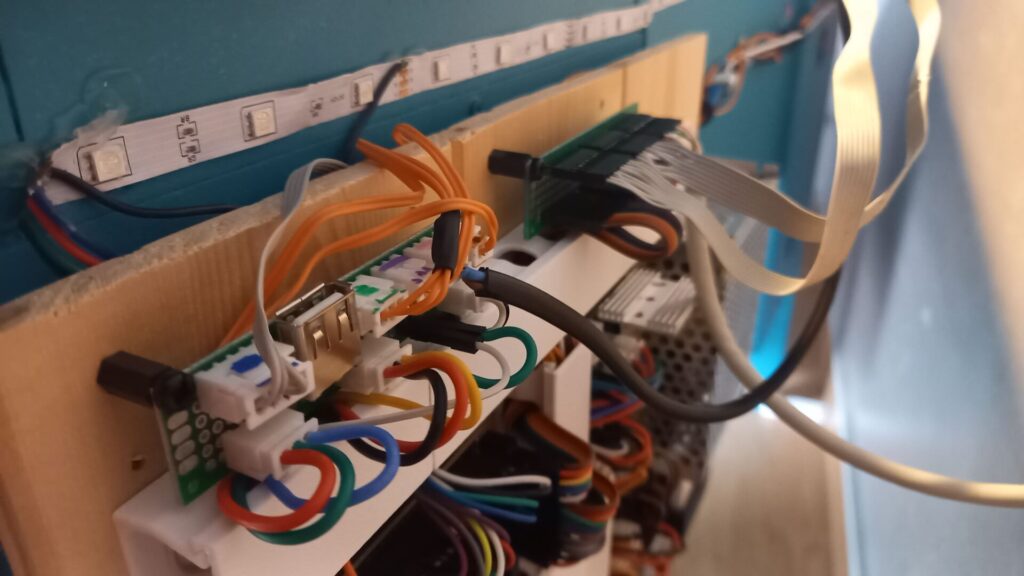
La caméra
La caméra étant un ESP32-CAM indépendant, je n’ai qu’à assurer l’alimentation de celle-ci. Un courant est récupéré sur l’alimentation de la porte (voir ci-dessus) et transporté jusqu’en haut de la porte.
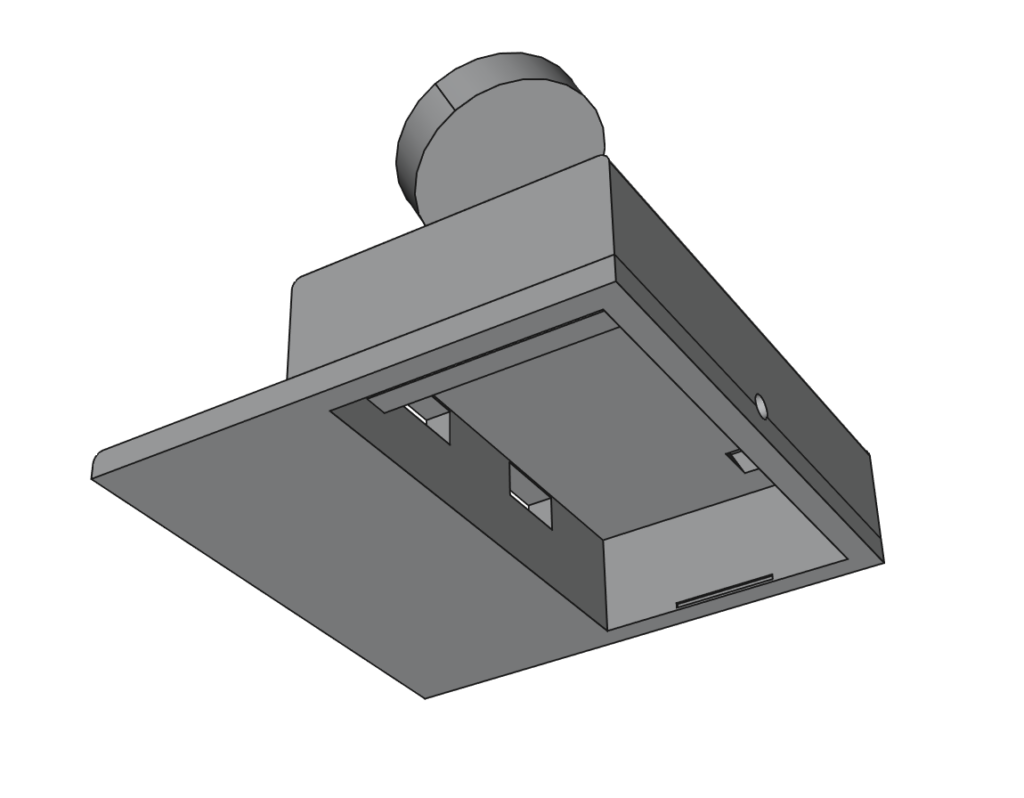
J’ai créé un petit boîtier imprimé en 3D pour héberger un connecteur USB-A. :

Le boîtier de contrôle
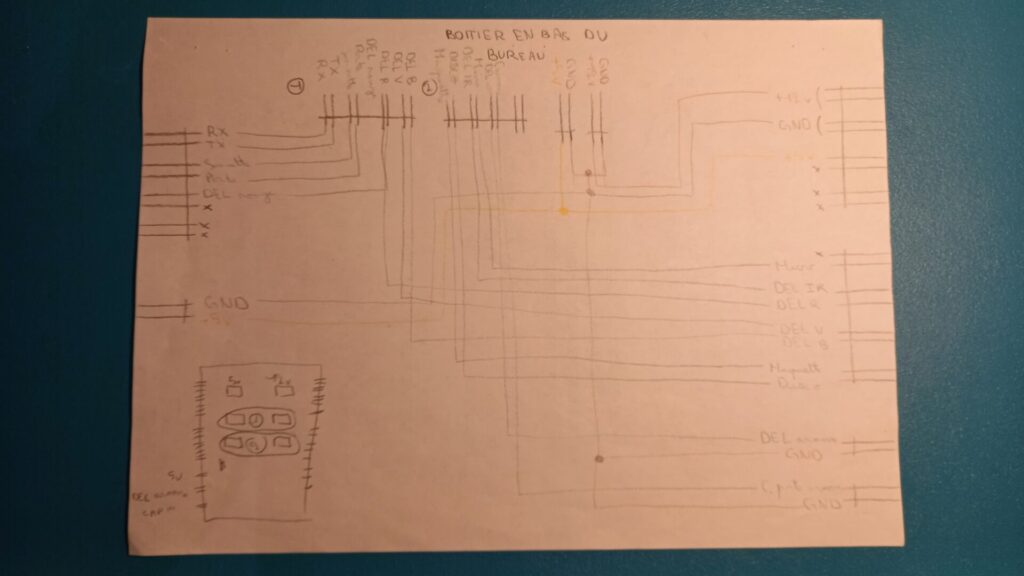
C’est l’élément central de contrôle de la domotique de la chambre. Il se compose d’une interface avec clavier et écran ainsi que de connecteurs d’alimentation.
Le clavier est une grille de 4×4 touches. Il a un connecteur dédié à l’arrière du boîtier (il nécessite huit broches). L’écran est un petit module OLED monochrome de 128×64 pixels. Il est géré en I2C par l’Arduino Méga.
Les ports d’alimentation sont les suivants :
- Un connecteur jack en 12 V, pour alimenter notamment un variateur de tension.
- Une prise USB-A avec charge rapide.
- Une prise USB-C ; celui-ci étant principalement prévu pour programmer l’Arduino Mega car il ne permet pas de délivrer une puissance importante.
Il y a en plus le buzzer de l’interface (utilisé pour la sonnette et des messages de confirmation / refus).
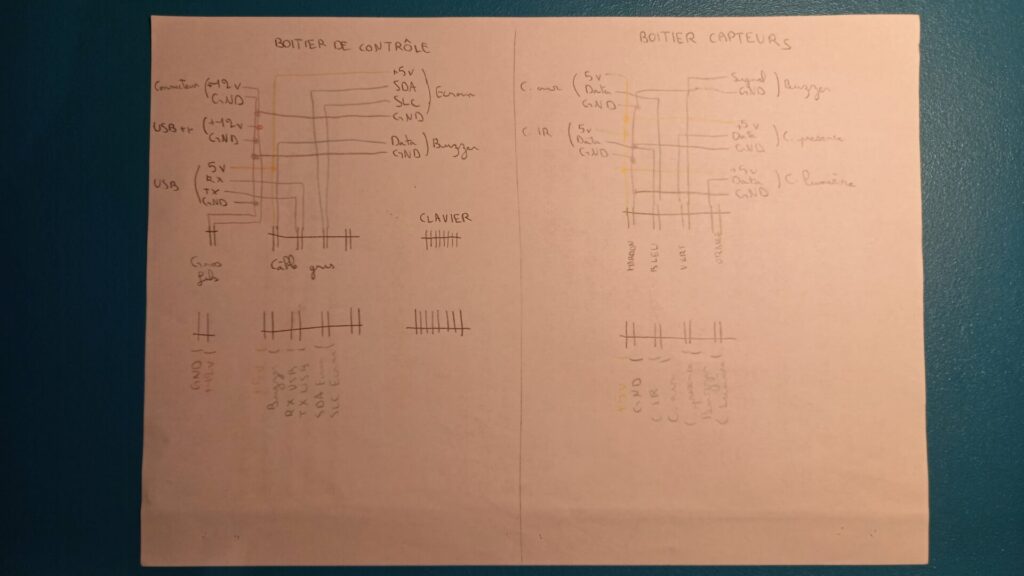
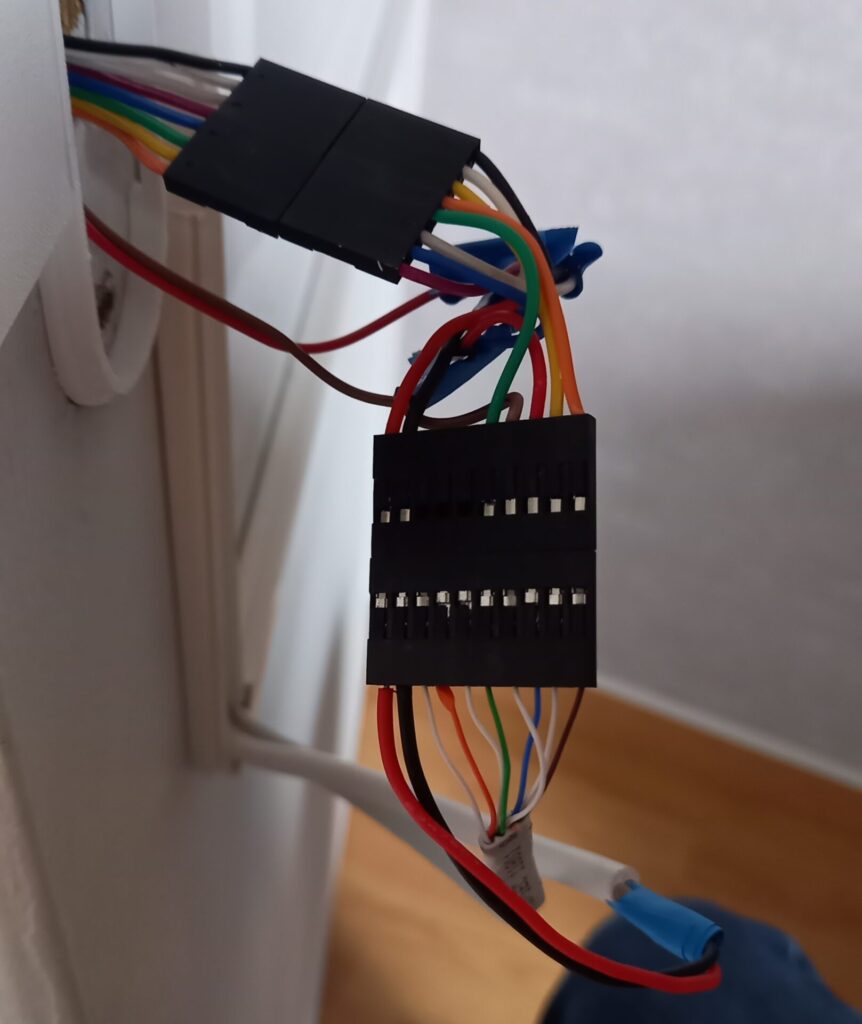
Une fois encore, le câblage n’est pas des plus intéressants. Il y a donc deux nappes qui sortent du boîtier : l’une pour le clavier et l’autre pour tout le reste. Il y a en plus un câble d’alimentation en 12 V (connecté par prise jack). La documentation décrit toutes les connexions :
Ce boîtier présente un défaut plus ou moins embêtant. Les câbles d’alimentations n’apprécient pas être manipulés (probablement des interférences) et cela cause parfois un arrêt de l’écran. Il faut alors redémarrer le programme pour que l’écran refonctionne.
Le plateau ouvrant
Comme je l’ai expliqué dans d’autres articles sur le sujet, le plateau est mis en mouvement par un lecteur de CD récupéré. Je l’ai désossé pour en garder que les parties vitales : le moteur ouvrant et fermant le plateau du CD. Il est installé ainsi :

Le lecteur est fixé sur la surface du plateau amovible de façon à être fermé lorsque le plateau du bureau est en butée. Pour garder le fonctionnement manuel du plateau, la liaison entre le lecteur et le fond du bureau est assuré par des aimants. On peut aisément le détacher du système automatique.
L’alimentation se fait par un câble enroulé (récupéré d’un ancien téléphone filaire) car il a besoin de s’allonger tout en ne pendant pas quand il est fermé (c’est-à-dire la majorité du temps) !
L’alimentation du moteur se fait par un pont en H (un circuit L293D) situé sur la plaque centrale.
La télévision connectée
Plusieurs éléments composent la télévision connectée.
Le contrôle du système d’enceintes
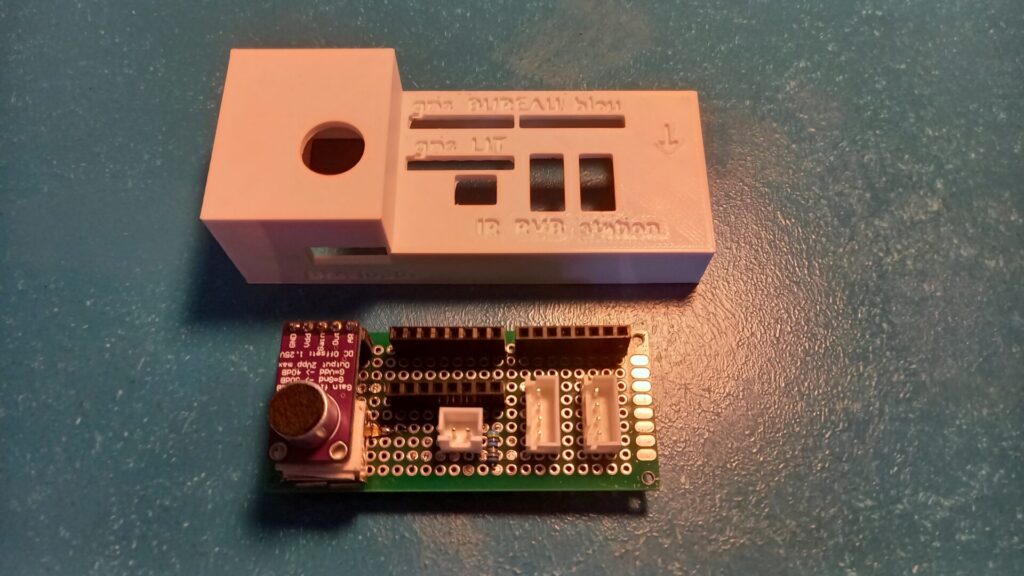
J’ai récupéré un vieux système d’enceintes. Par chance, il peut être contrôle grâce à une télécommande qui communique en infrarouge. Bien évidemment, je n’ai pas mis un moteur cliquant sur la télécommande (pas cette fois-ci en tout cas) ! J’ai plutôt utilisé un Arduino avec un récepteur d’ondes infrarouges pour récupérer les codes envoyés par la télécommande. Cela me permet de répliquer le comportement de la télécommande grâce à ma propre DEL infrarouge. Vous pouvez d’ailleurs retrouver dans le programme les codes que j’utilise. J’ai placé la DEL juste devant le récepteur, dans un petit boîtier imprimé en 3D :

J’ai été confronté à des problèmes sur la réception des ondes infrarouges. Avec les moyens à ma disposition, j’ai essayé de trouver la source de l’erreur, avec beaucoup de difficulté. J’ai dans un premier temps suspecté ma DEL, mais en regardant à la caméra (qui est sensible aux infrarouges), je voyais bien l’allumage de la diode. J’ai aussi modifié le programme, mais sans résultat. Un peu désespéré, j’ai démonté l’amplificateur pour voir comment le capteur infrarouge se présentait. Je l’ai changé, et cela a fonctionné !
Le contrôle de la télévision
Pour allumer et éteindre l’écran d’ordinateur (qui fait office de télévision), je n’ai cette fois pas eu le choix d’installer un servomoteur cliquant sur le bouton marche/arrêt de l’écran. Il est simplement attaché à l’aide de ruban adhésif double-face.
L’intégration de la télécommande Google
Pour intégrer parfaitement la télécommande Google, j’ai ajouté au boîtier des capteurs un récepteur infrarouge. La télécommande a une fonction de changement de source de la télévision qui envoie un signal infrarouge. En reprenant la même méthode que plus haut, on peut détecter le code spécifique à l’appui de la touche pour effectuer n’importe quelle action : chez moi, elle allume le ruban lumineux ainsi que le cube de DEL.
L’armoire
L’armoire est liée par deux paires de fils électrique : l’une pour les capteurs de la porte, et l’autre pour les rubans lumineux blanc. J’ai utilisé du fil électrique d’artificier parce que 1. j’en ai une grande quantité sous la main et 2. c’est un fil fin. Je n’ai pas vérifié que le diamètre du conducteur soit suffisant pour alimenter les rubans, mais je n’ai remarqué jusque-là aucun incendie dans ma chambre.
L’ouverture des portes est détectée grâce à deux capteurs de fin de course liés en série et en mode NO (pour Normally Opened, ce qui signifie qu’ils sont ouverts dans leur état naturel). Lorsque les portes sont fermées, le capteur est pressé, l’interrupteur se ferme donc. Lorsque les deux portes sont fermées, le circuit est fermé, mais dès que l’on ouvre une des deux portes, l’Arduino Mega le détecte, car le circuit est ouvert.

La plaque centrale
Nous avons vu jusque-là tous les éléments périphériques, ainsi que leurs connexions qui convergent toutes vers… la plaque centrale ! C’est le cœur du système de domotique de la chambre.
C’est l’élément que j’ai réalisé en dernier, de sorte que je savais exactement les fonctions et les connecteurs que cette plaque devrait intégrer par rapport aux appareils en périphérie.
Planification de la plaque centrale
La première étape de la conception de cet élément central consiste à sélectionner tous les composants nécessaires. Cette étape est venue après la phase initiale de conception du réseau avec les appareils périphériques. J’ai pu dimensionner les besoins en alimentation, en composants de pilotage, etc.
Je me suis approvisionné auprès de plusieurs fournisseurs :
- Reichelt.
- Amazon.
- Depuis peu (après la réalisation de l’installation) je me fournis aussi chez Aliexpress qui propose des prix bien plus attractifs pour des composants qui sortent souvent de la même usine…
- Mon armoire.
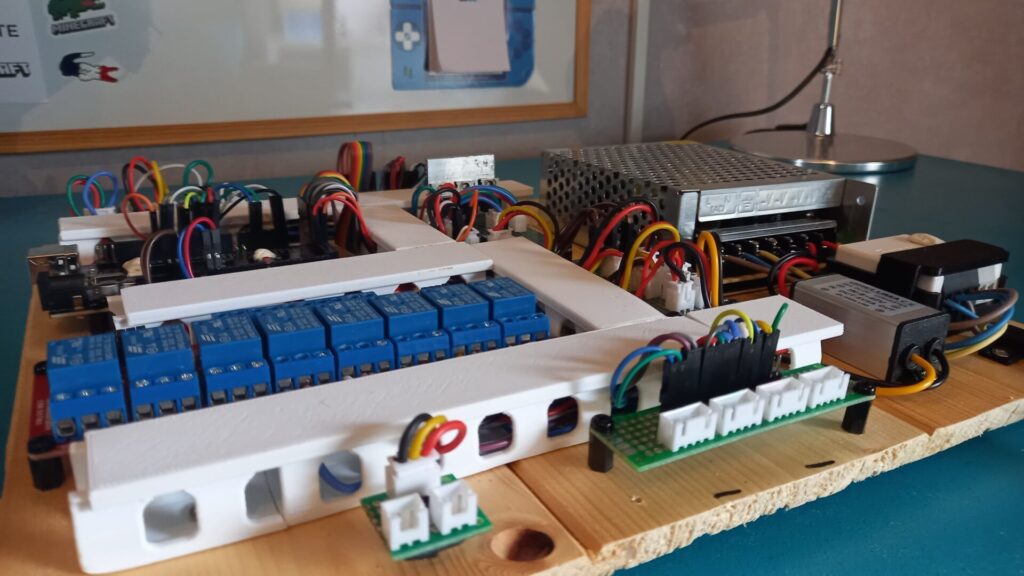
J’ai pris pour base de la plaque des chutes de bois que j’ai trouvé chez moi. Le tout se fixe à l’arrière du bureau comme un cadre (mais avec quatre vis pour que ce soit solide !). Je peux aisément détacher le tout pour travailler sur la plaque dans un endroit plus confortable.
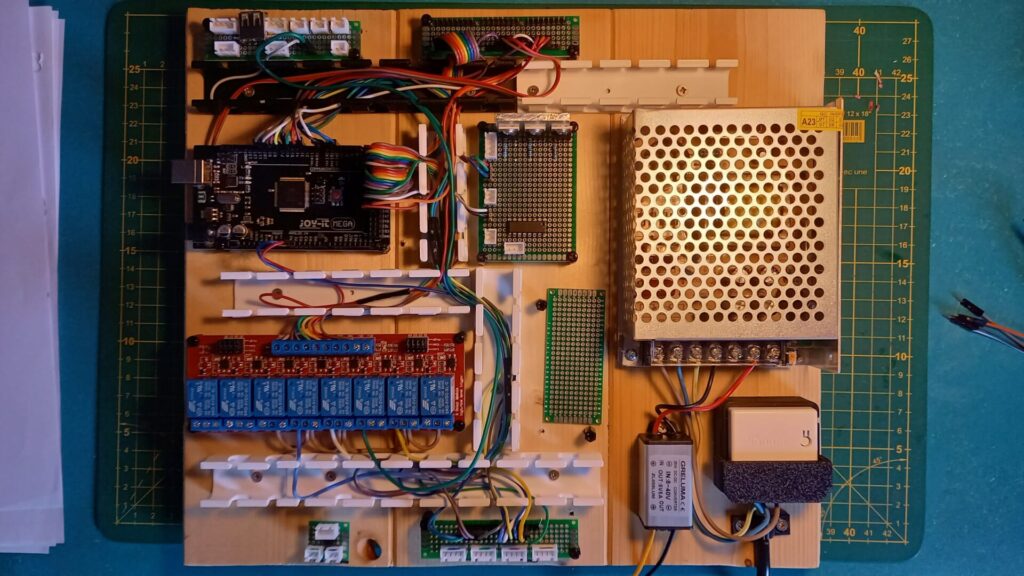
J’ai commencé par organiser les éléments ainsi :
Pour que les câbles ne désordonnent pas la plaque et que le tout reste propre, j’ai imprimé en 3D des rails (il me semble que j’avais réduit l’échelle à 80 %).
Le positionnement des composants
À mesure que les composants étaient prêts à être disposés sur la plaque, j’ai remplacé les papiers par leur version réelle. On entre maintenant dans la réalisation !
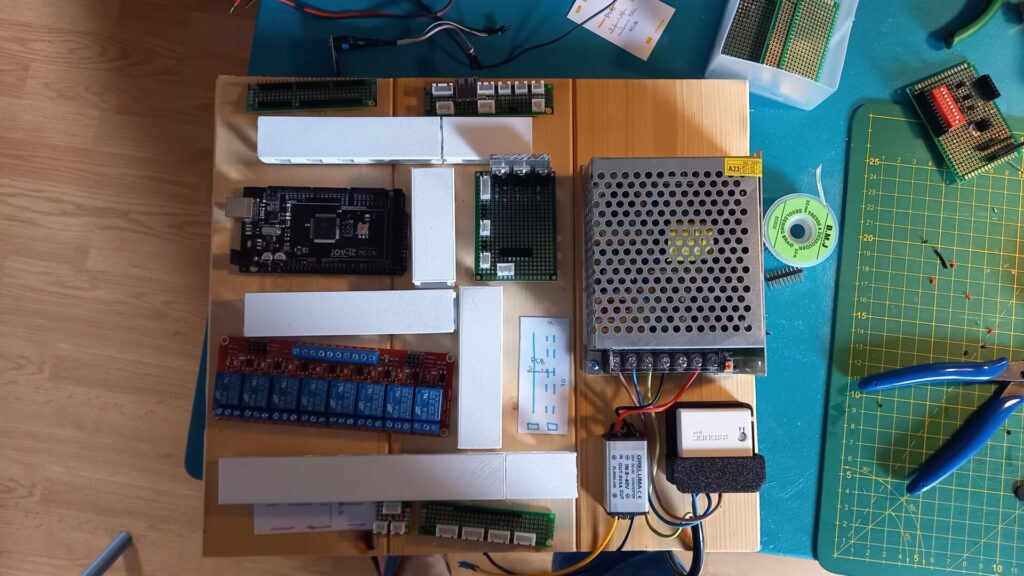
J’utilise les modules suivants :
- Un relais SONOFF pour couper l’alimentation générale du système.
- Une alimentation 12 V 5 A.
- Un convertisseur 12 V vers 5 V 5 A.
- Un module huit relais.
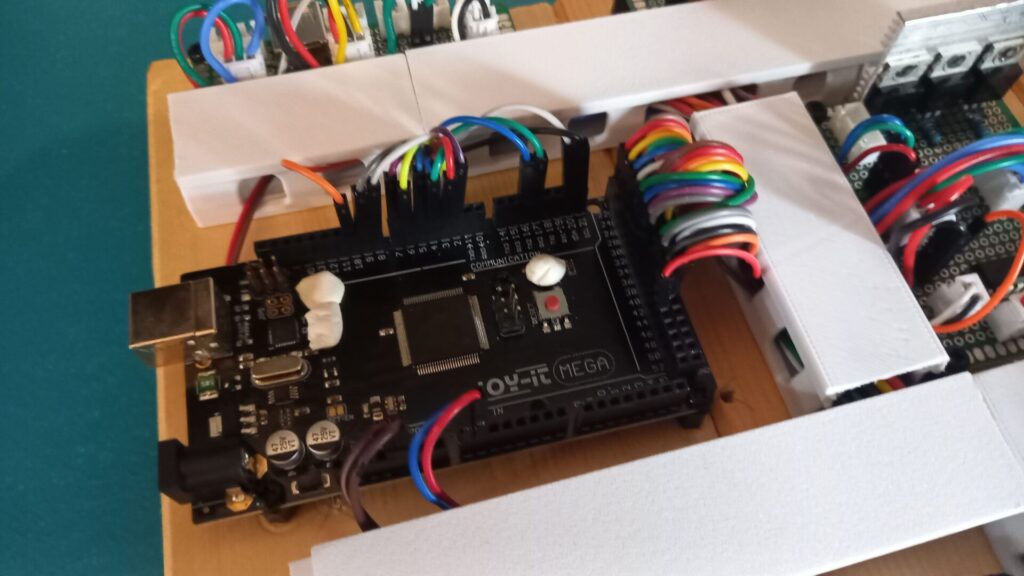
- Un Arduino Mega 2560 Rev3.
En parallèle, j’ai dû réaliser plusieurs circuits (certains sont déjà positionnés sur la photographie ci-dessus) moi-même. Comme pour les boîtiers de dérivation, j’ai suivi les étapes suivantes :
- Réalisation des circuits sur papier, avec les connecteurs et les composants nécessaires.
- Positionnement de tous les composants réunis sur des circuits imprimés de prototypage.
- Soudure des composants et réalisation des circuits.
J’ai produit les cartes suivantes :
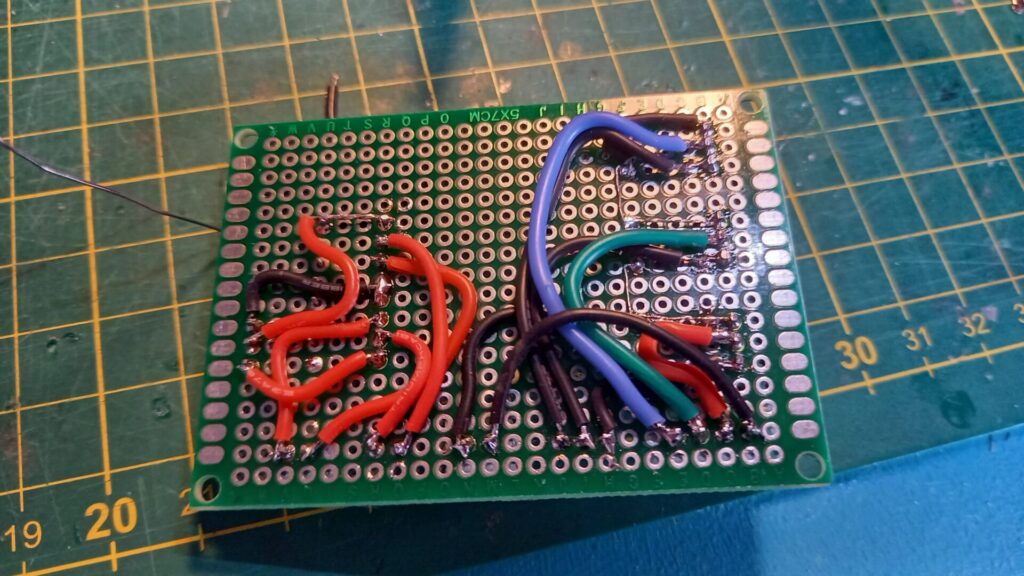
Elles ont chacun leur utilité :
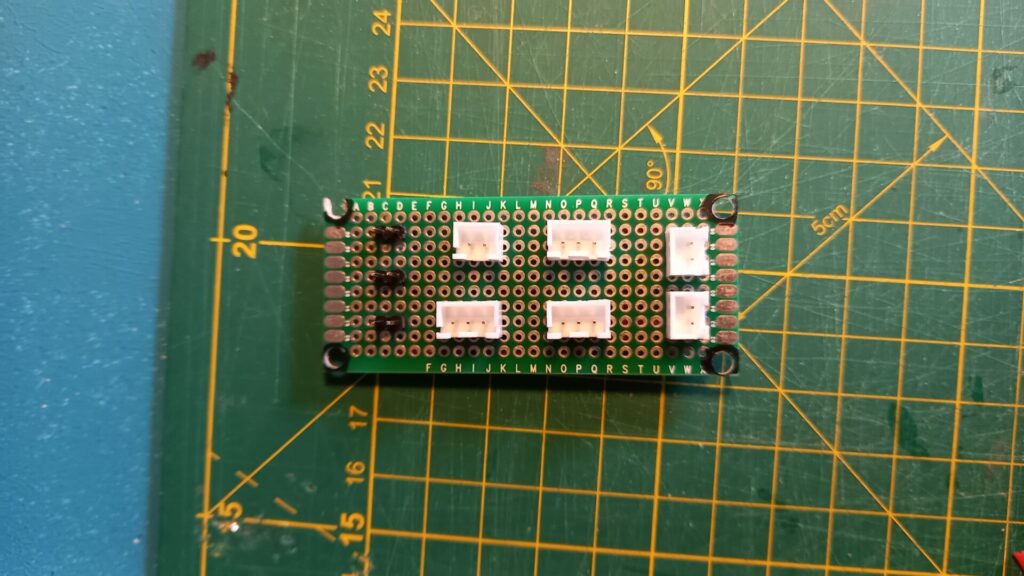
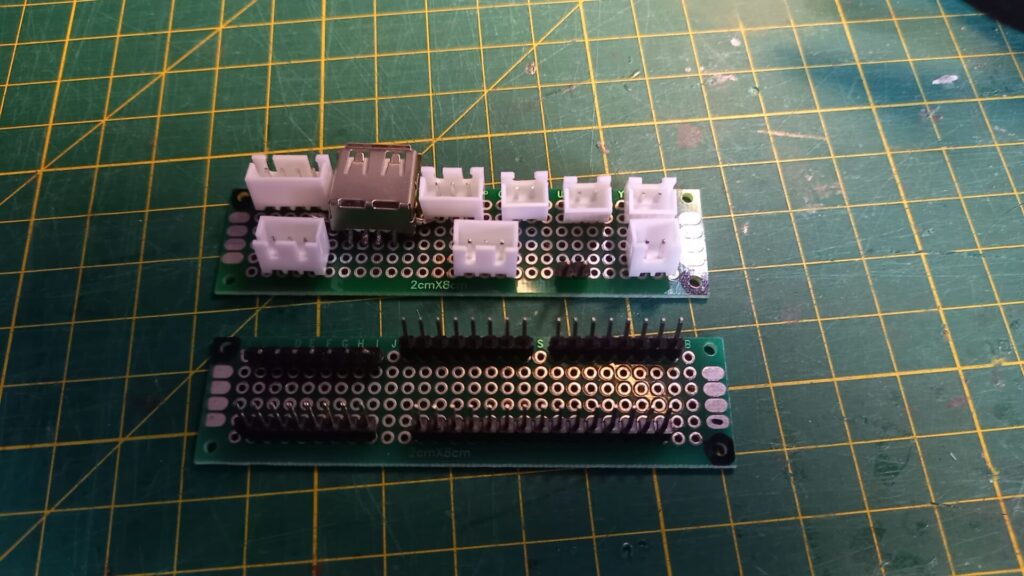
- Une plaque distribue du courant à tous les organes du système dans les tensions nécessaires.
- Des circuits situés en haut et en bas de la plaque centrale hébergent les connecteurs pour assurer la liaison avec la périphérie (avoir deux bandes de connecteurs en haut et en bas permet de rendre le câblage plus propre).
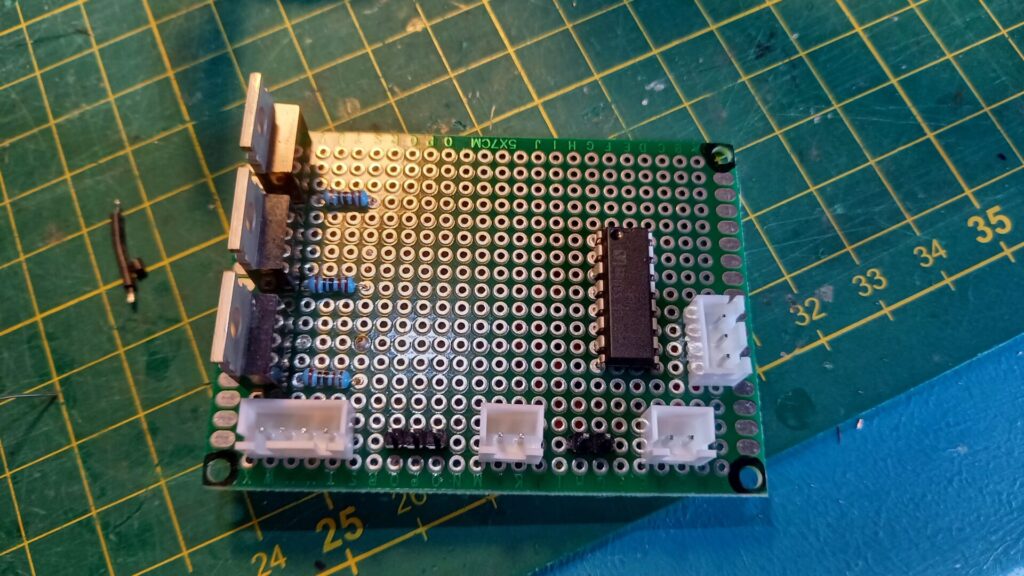
- Un circuit de contrôle de puissance pour :
- Les rubans lumineux, à l’aide de trois MOSFET (un par composante de la couleur : rouge, vert et bleu).
- Le moteur du plateau sous le bureau, à l’aide d’un circuit intégré pont en H
L293D.
J’ai utilisé des entretoises pour fixer chaque circuit imprimé sur la plaque en bois.
Une fois chaque composant solidement fixé sur la plaque, vient le câblage !
Planification des câblages
J’avais déjà une idée à ce moment des câblages qui devaient être réalisés, rien que parce que j’ai dû réfléchir aux connecteurs de chaque circuit imprimé. Cependant, je n’avais pas encore défini l’assignation des broches de l’Arduino Mega (ce qui peut être utile…).
J’ai donc ouvert un document LibreOffice Calc pour consigner toutes les broches de l’Arduino Mega. Je les ai ensuite associées une par une aux liaisons dont j’avais besoin. J’ai bien évidemment pris en compte les caractéristiques de chaque broche (bus, PWM, analogique, etc.) !
L’Arduino Mega offre un nombre important de broches, ce qui est particulièrement utile dans mon cas. Par exemple, le clavier de contrôle utilise rien qu’à lui huit broches ! J’ai aussi pu utiliser trois bus UART sans souci : pour le lecteur de carte, le lance-missile et l’ESP8266-01.
Réalisation du câblage
J’ai utilisé plusieurs types de fil électrique :
- Des nappes (multicolores) pour les signaux à faible puissance.
- Des câbles à plus gros calibre pour la puissance.
Les types de connectique dépendent des câbles utilisés, parce que leurs différences de calibre ne sont pas compatibles (par exemple, un connecteur Dupont ne va pas correctement fonctionner avec un gros câble).
Avec des câbles sur-mesure, j’ai pu définir les longueurs adaptées pour limiter le désordre.
J’ai particulièrement porté attention à l’alimentation (en 220 V) parce que la domotique est inutile s’il n’y a plus de maison (à la suite d’un incendie par exemple)…
Le câblage aura été une étape fastidieuse ! Il est surtout important de rester concentré sur ce que l’on fait pour éviter les surprises à la mise sous tension… Une fois le câblage terminé, voilà le résultat :
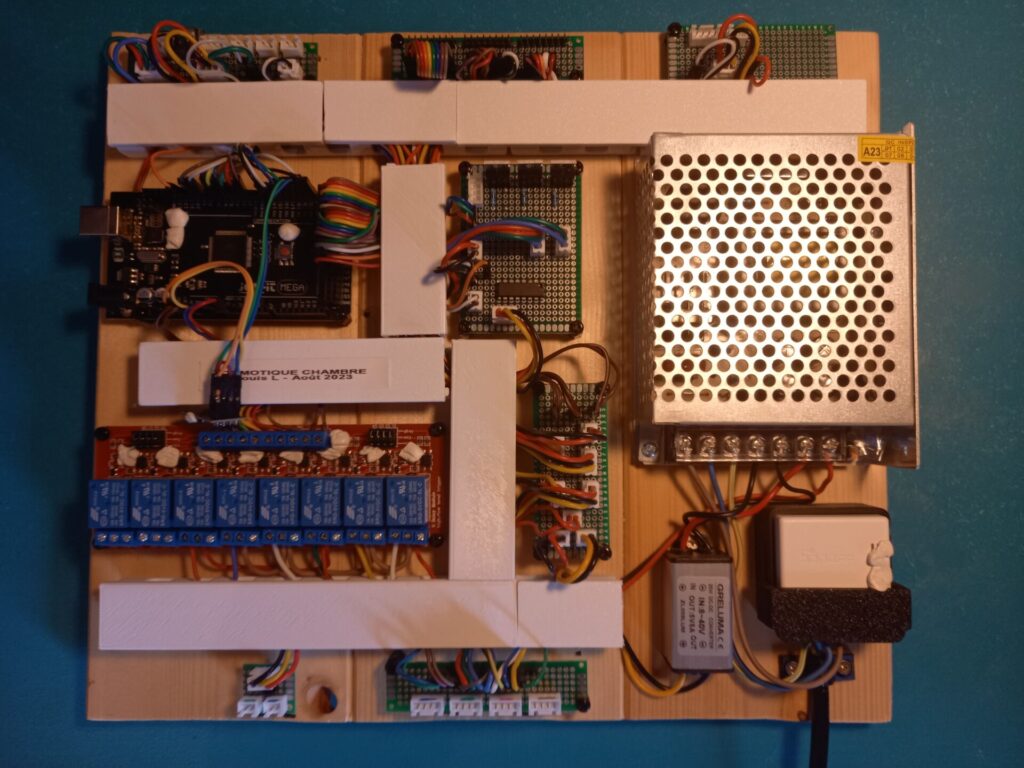
Je suis particulièrement satisfait du résultat, d’autant plus qu’une fois la plaque intégrée au reste du système, les câbles alentours se connectent sur les deux zones (en haut et en bas).

Je n’ai pas fixé l’ESP8266-01 sur la plaque pour laisser l’antenne en avant et de toute façon la carte est petite donc peu dérangeante.
Vous remarquerez aussi la technique de la patte à fixer pour masquer les voyants !
L’assemblage final
Tous les organes du système de domotique de la chambre sont prêts à être assemblés pour un premier démarrage !
Cette étape est facile, voir satisfaisante puisqu’il suffit de connecter tous les câbles préparés entre eux.
Pour faciliter les démontages futurs, j’ai utilisé des feutres POSCA pour marquer la correspondance entre un connecteur et le fil électrique.


En bref, c’est un jeu d’enfant. Par rapport à la version précédente qui demandait des heures de remontage pour que tout fonctionne, ici, je peux démonter puis remonter la plaque principale en une dizaine de minutes, et sans rien casser !
Je n’ai pas souvenir avoir eu de problème majeur à la première mise sous tension. Bien évidemment, il y avait le petit stress de sentir le brûlé… mais ce n’est pas arrivé cette fois !
J’ai plus tard réalisé sur Fritzing le schéma complet du câblage de la domotique de la chambre.
La partie câblage est maintenant terminée ! J’ai en plus réussi à tenir mon objectif de propreté. C’est le programme qui va maintenant prendre le relais !
Laisser un commentaire